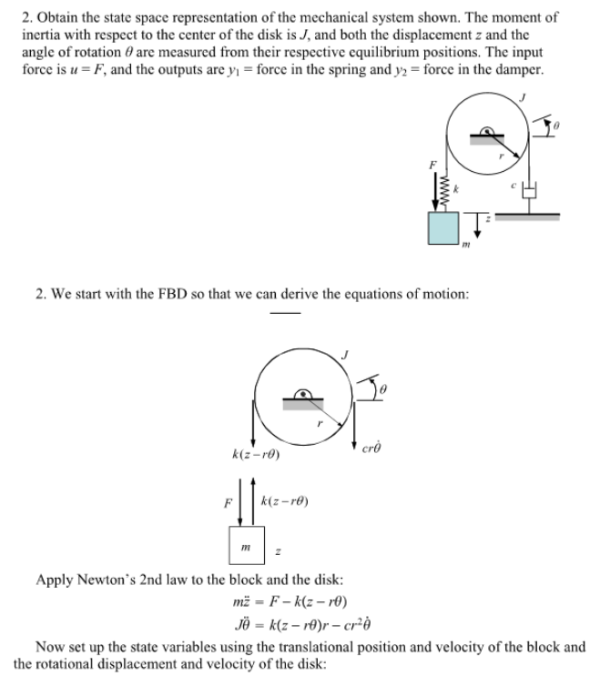
Obtain the state space representation of the mechanical system shown. The moment of inertia with respect to the center of the disk is J, and both the displacement z and the angle of rotation theta are measured from their respective equilibrium positions. The input force is u=F, and the outputs are y1=force in the spring and y2=force in the damper.
Highalphabet Home Page dynamics dynamics System Dynamics Page 1

Obtain the state space representation of the mechanical system shown. The moment of inertia with respect to the center of the disk is J, and both the displacement z and the angle of rotation theta are measured from their respective equilibrium positions. The input force is u=F, and the outputs are y1=force in the spring and y2=force in the damper.
System Dynamics Page 2 dynamics dynamics dynamics dynamics dynamics dynamics dynamics System dynamics Page 3